
PART 1 : An introduction to Navigation.¶
- Table of contents
- PART 1 : An introduction to Navigation.
Before anything else, it is necessary to tackle the origin of navigation and its applications, the creation of the current GNSS with a comparison of different systems and finally, describing the main principles of GPS.
1 - History of Navigation.¶
Navigation is defined as a field of study that focuses on the process of monitoring and controlling the movement of a craft or vehicle from one place to another. The field of navigation includes four general categories: land navigation, marine navigation, aeronautic navigation, and space navigation.
A brief evolution of Navigation through history is suggested in the following.





Figure 1.1 : Lighthouse __________________ Figure 1.2 : Magnetic compass ______________ Figure 1.3 : Sextant ________ Figure 1.4 : Chronometer _____ Figure 1.5 : TomTom GPS
a- Visual navigation.¶
Seamark and landmark references [Figure 1.1] where among the first entities to help to find a direction. However, this system works with a limited range, a limited accuracy, a low availability of marks.
Note that stars has been used for centuries, but are only available during night and clear sky.
b- Navigation with classic instruments.¶
Then, come the Magnetic compass [Figure 1.2], the Sextant [Figure 1.3] as navigation tools.
The last one allows the measurement of the height of stars above the horizon providing longitude inaccurately i.e. it was the first use of ephemeris and time reference.
Improvements has been done by combining it with Harrison's clock (Chronometer) [Figure 1.4] providing latitude and longitude with acceptable accuracy.
2 - Global Navigation Satellite System (GNSS).¶
a- History.¶
- Sputnik in 1957 : first satellite in the world, orbit estimated using the received signal frequency via Doppler effect.
- TRANSIT from 1958 operational in 1964 : first satellite navigation system for the US Navy.
- GPS program started at 1973 providing position anywhere at anytime.
b- Current definition.¶
Global Navigation Satellite System (GNSS) is defined as a system of satellites that provide autonomous spatial positioning on Earth with global coverage.
It allows small electronic receivers to determine their location (longitude/latitude/altitude) to high precision (within a few meters) using time signals transmitted along a line of sight by radio from satellites.
Global coverage for each system is generally achieved by a satellite constellation of 20–30 medium Earth orbit (MEO) satellites spread between several orbital planes. The actual systems vary, but use orbital inclinations of >50° and orbital periods of roughly 12 hours.
3 - Comparison of systems.¶
Various global satellite navigation systems has been developped in different countries and while some of them are currently used, others are in preparation. The following array sums up these systems and underlines their differences :
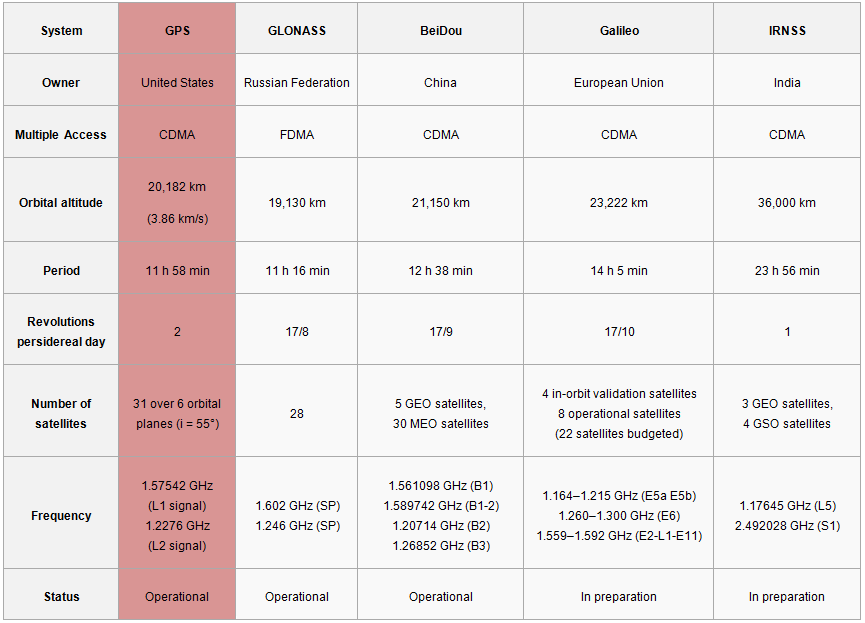
Figure 1.6 : Comparison of GNSS systems.
An illustration of their orbits in terms of altitude and revolution period is proposed :
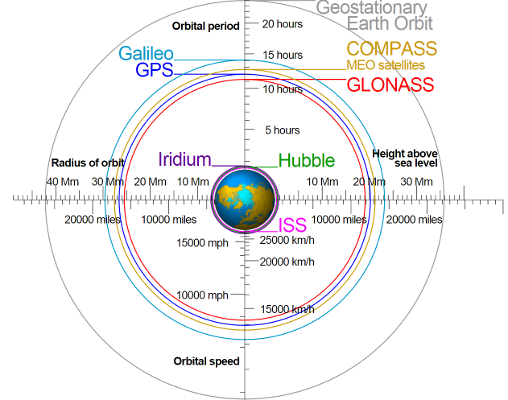
Figure 1.7 : Orbits of GNSS systems.
4 - Our system : GPS details.¶
a- Space Segment.¶
The official GPS website [5] describes the evolution of the space segment by improving the satellites' capabilities :
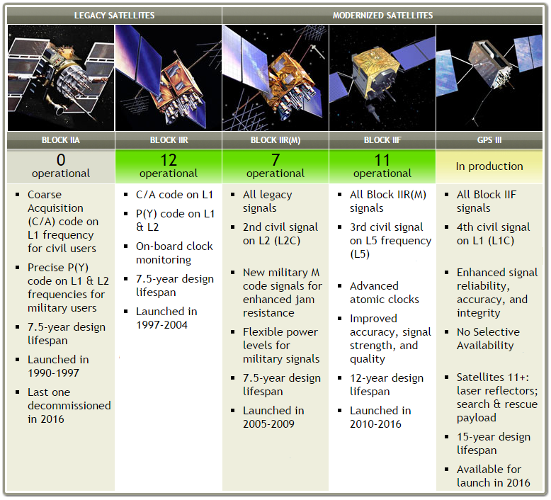
Figure 1.8 : Evolution of the GPS satellites with their characteristics through time
Here is an animation depicting the GPS constellation with the number of available satellites through time :

Figure 1.9 : GPS constellation
b- Ground Control Segment.¶
The Ground Control Segment handles different aspect of the constellation :
- Continuous tasks : Tracks GPS satellites, estimates clock and orbit, keeps GPS time, uploads data that describes clock & orbit for each satellite.
- Infrequent tasks: Commands small maneuvers to maintain orbit, small clock corrections, major relocations to compensate any satellite failure.
c- Delivery of Navigation messages.¶
Considering the exchange of data : Clock & Ephemeris are sent by the Ground Segment to Space Segment, while Spread Spectrum ranging signals & navigation data sent by Space Segment to User & Ground Segment.
d- Signals.¶
As a simple model, the GPS signal can be decompose in navigation data D(t) spread via code C(t) and modulated on a carrier frequency f(t) :
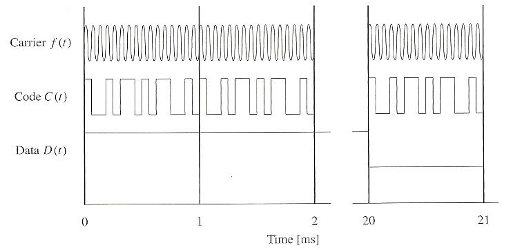
Figure 1.10 : Signal decomposition
e- Ranging.¶
The basic concept of localization relies on the measurement of 3 distances from 3 different entities (satellites orbiting the Earth). Knowing the positions of these entities, it is possible determine the desired location with a certain accuracy.
Parameters have to be measured :
- Propagation time : Time of transmission - Time of reception
- Distance between satellite and receiver \approx Propagation time x Speed of light
The process used is so-called trilateration, which can be defined as the way of determining absolute or relative locations of geometric points by measurement of distances, using the geometry of circles, spheres or triangles. :
1 measurement : 1 sphere of radius D1 centered in Sat1
2 measurements : intersection of 2 spheres (D1, Sat1) (D2, Sat2) = Circle
3 measurements : intersection of 3 spheres (D1, Sat1) (D2, Sat3) (D2, Sat3) = 2 points (1 often aberrant)
These measurements are depicted on the figure :
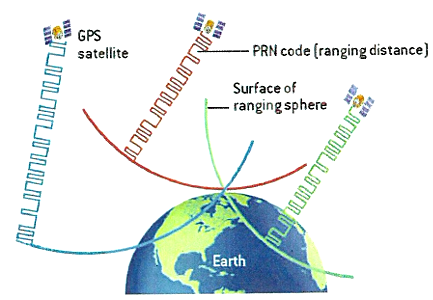
Figure 1.11 : Pseudo-Ranging method.
The official GPS website [5] also provides an explicit scheme of how it works under : 29.pdf
Note that in reality, a 4th measurement is necessary in order to find the clock bias between the clock of the satellite and the clock of the receiver.
f- GNSS Receivers.¶
Classical GNSS receivers are divided into 4 important steps : Acquisition, Tracking, Navigation data decoding and Localization computation as explained on [Figure 1.12] and [Figure 1.13] extracted from [1] :

Figure 1.12 : Receiver algorithm.

Figure 1.13 : Receiver diagram.
g- GNSS Measurements.¶
3 ways of measurements are used for navigation computation with a associated accuracy and robustness : Pseudorange method, Carrier phase measurement method and Doppler ranges method :
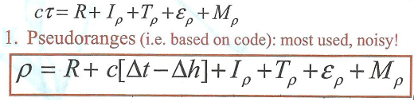
Figure 1.14 : Pseudorange equation.

Figure 1.15 : Pseudorange parameters.

Figure 1.16 : Carrier phase measurements equation.

Figure 1.17 : Doppler ranges parameters.
Note that our project will be focused on the first method.
References :
[1] M. Sahmoudi, Introduction to satellite positioning & multi-sensor navigation, 2016
[2] K. Borre, D. M. Akos, N. Bertelsen, P. Rinder, S. H. Jensen, A software-defined GPS and GALILEO receiver
[3] https://en.wikipedia.org/wiki/Satellite_navigation
[4] https://en.wikipedia.org/wiki/Global_Positioning_System
[5] http://www.gps.gov/systems/gps/