
PART3 » History » Version 47
« Previous -
Version 47/83
(diff) -
Next » -
Current version
JANVIER, Thibault, 03/23/2016 08:47 AM
PART 5 : Implementation and results.¶
- Table of contents
- PART 5 : Implementation and results.
This part is dedicated to explain and illustrate the main steps that have been done in order to retrieve a navigation signal and to compute the position of the receiver from the pseudo-range measurements of 4 satellites. PART 2, PART 3 and PART 4 provided a theoretical background on GPS signals, the main blocks of a GPS receiver and methods to compute the position using the navigation data. Now, it is time to put this theoretical knowledge into practice.
As lots of VIs have been created, a UML diagram has been drawn to illustrate the structure of the overall code. For each main step that will be described, a link to the UML diagram will be provided, the different VIs to be taken into consideration will be listed, a few key points regarding the implementation will be clarified and the results will be displayed.
1 - Starting point.¶
a - Receiver scheme and milestones.¶
.......
b - Quid about LabVIEW.¶
.......
Input : GPS signal of sampling frequency 38.192 MHz at intermediate frequency 9.55 MHz from CD [1] under GNSS_signal_records/GPSdata-DiscreteComponents-fs38_192-if9_55.bin
c - Local C/A code generation.¶
The files involved are :
- CA_Code.vi
- CA_generatorG1.vi
- CA_generatorG2.vi
2 - Acquisition.¶
See the UML Diagram of Section 2 under : Acquisition.PNG
{kind=link}
The files involved are :
- Main_Acquisition.vi : SnapAcquisition.PNG
- Acquisition_subVI.vi : SnapAcquisitionSub.png
- CA_Code.vi
{kind=link}
{kind=link}
Justification acquisition method in terms of accuracy and time execution
Justification of the step of 500Hz
Methods to avoid the data bit transition while running acquisition
Frequency refine is needed for the PLL of the tracking to converge
Definition of the threshold and how it is implemented
.......¶
...........
3 - Tracking.¶
Justification of the DLL discriminator
Correction of the blocksize to read as a function of the doppler shift
See the UML Diagram of Section 2 under : Track.PNG
{kind=link}
The files involved are :
- Main_Carrier_Tracking.vi : SnapTracking.png
- CalcLoopCoeff.vi : SnapCalcLoopCoeff.PNG
{kind=link}
{kind=link}
.......¶
...........
![]()
4 - Navigation Data decoding.¶
See the UML Diagram of Section 4 under : NavigationData.PNG.
{kind=link}
a - Delimiting subframes.¶
The files involved are :
- FindPreamble.vi
- TestFindPreamble.vi : SnapTestFindPreamble.PNG
- GenerateFrame.vi
- ParityCheck.vi : SnapParityCheck.png
{kind=link}
{kind=link}
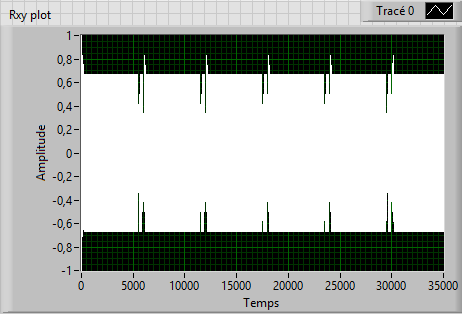
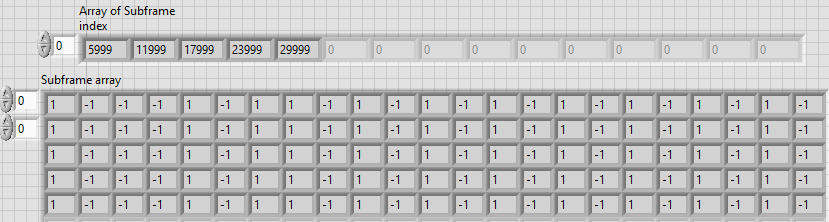
Figure 5. : Cross-correlation between navigation frame and local preamble. Figure 5. : Subframes with index of delimitation.
b- Decoding ephemeris and information within the frame.¶
The files involved are :
- Ephemeris.vi
- BinaryArrayToDecimal.vi : SnapBinaryArrayToDecimal.PNG
- twosComp2dec.vi : SnapTwosComp2dec.PNG
- ParityCheck.vi_ : SnapParityCheck.png
- TestEphemeris.vi
{kind=link}
{kind=link}
5 - Elementary blocks for localization.¶
See the UML Diagram of Section 5 under : Localization.PNG
{kind=link}
a - Satellite position.¶
The files involved are :
- SatellitePosition.vi
- TestSatellitePosition.vi : SnapTest_satellite_position.PNG
- Check_time.vi : SnapCheckTime.PNG
{kind=link}
{kind=link}
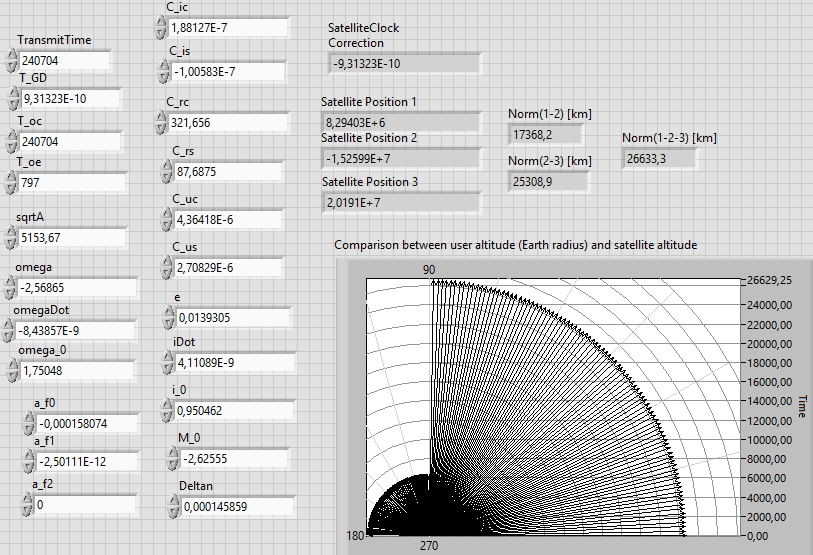
Figure 5. : Interface with ephemeris as input and illustration of the satellite position.
b - Pseudoranges.¶
The file involved is :
PseudorangesComputation.vi
c - Least Square solution for position determination.¶
The files involved are :
- LeastSquarePosition.vi
- SatelliteRotationECEF.vi : SnapSatelliteRotationECEF.PNG
- toTopocentric.vi : SnaptoTopocentric.png
- CartesianToGeodetic.vi : SnapCartesianToGeodetic.png
- TroposphericCorrection.vi
{kind=link}
{kind=link}
{kind=link}
6 - Receiver position computation.¶
See the UML Diagram of Section 6 under : Receiver.PNG
{kind=link}
The files involved are :
- ComputeReceiverPosition.vi
- NavigationProcess.vi
- CartesianToGeodeticForUTM.vi : SnapCartesianToGeodeticForUTM.png
- CartesianToUTM.vi
{kind=link}
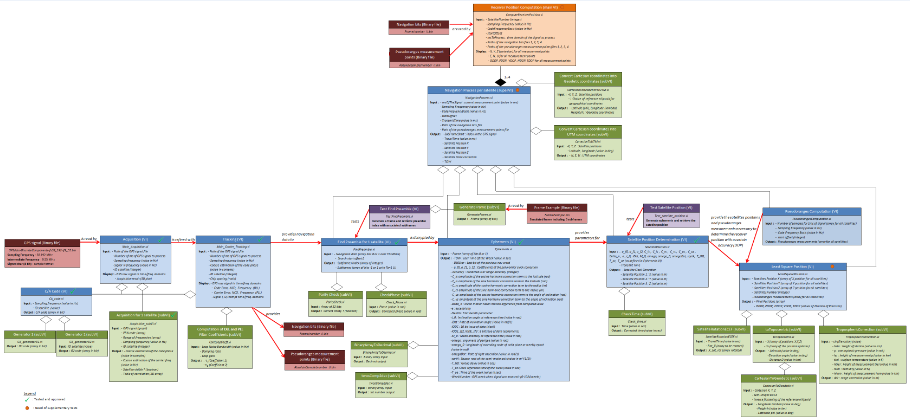
7 - Complete UML Diagram of the receiver.¶
The UML diagram with real size is available under : UMLDiagram.png
{kind=link}
Here is a small overview of the structure :
References :
[1] K. Borre, D. M. Akos, N. Bertelsen, P. Rinder, S. H. Jensen, A software-defined GPS and GALILEO receiver